Introduction
Model selection in this package mirrors the broader literature: match geometry, material contrast, and anatomical complexity before worrying about computational detail (Jech et al. 2015; Clay and Horne 1994; Stanton 1996).
There is no single deterministic rule that maps every scatterer to exactly one model. In practice, model choice depends on at least five questions:
- What is the gross geometry of the target?
- Is the target fluid-like, gas-filled, rigid, or elastic-shelled?
- Is a geometry-matched exact or modal-series solution available?
- Is the main goal physical fidelity, computational speed, or comparative screening?
- Is unresolved variability important enough that a fully coherent deterministic model is too sharp?
The flowchart below is therefore intended as a screening guide rather than as a strict decision rule. It identifies which models are typically the most natural starting points and where multiple models may be reasonable for the same target. Its purpose is to narrow the candidate set while keeping the physical tradeoffs visible.
The most important principle is that model selection should follow the target and the scientific question, not just model familiarity. A model can be mathematically sophisticated and still be the wrong starting point if its geometry, boundary assumptions, or approximation regime do not match the target. Conversely, a simpler model can be the better first choice if it captures the dominant physics of the question being asked.
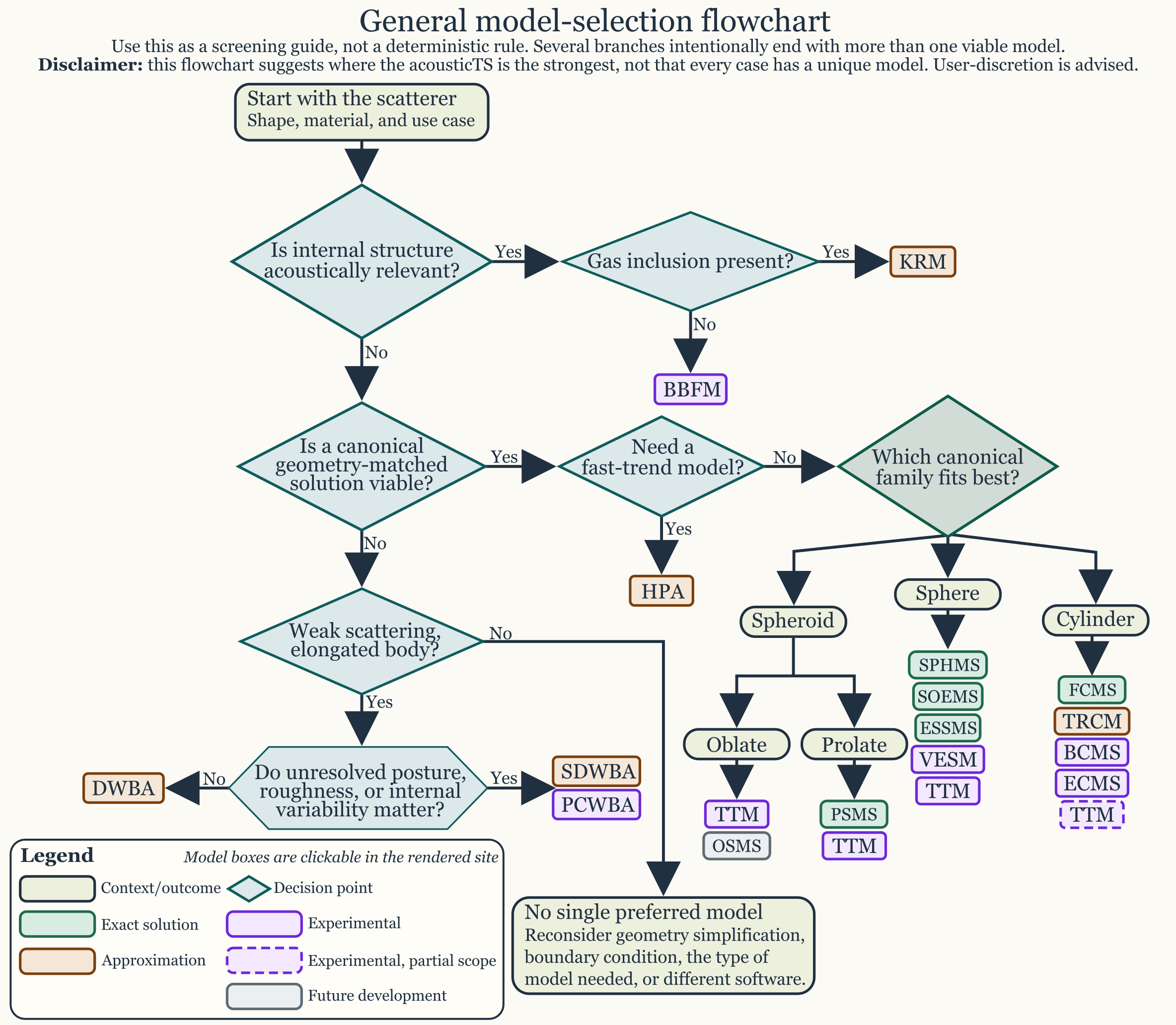
The chart separates composite internal structure, canonical geometry,
and asymptotic screening into distinct decisions rather than folding
them into a single forced branch. That leaves room for families such as
BBFM, BCMS, ECMS,
PCDWBA, VESM, and the shape-specific
TMM branches, and it also makes clearer that
HPA, SDWBA, and TRCM are often
neighboring screening or regime-specific alternatives rather than
absolute replacements for the more geometry-matched families.
Experimental families are shown in a separate color so they remain
visible without being confused with the longer-established model paths,
while gray boxes identify future-development families that have been
discussed but are not public package models.
Boundary condition is often as decisive as geometry in this decision process. A spherical pressure-release cavity, a fluid-filled sphere, and an elastic shell may look similar at gross scale while belonging to different model families because the interface physics is different in each case.
Core principle
When a geometry-matched exact or modal-series model exists and its assumptions are acceptable, that is usually the best first choice for mechanistic interpretation. Approximate models become most useful when the target geometry is not one of the canonical separable shapes, when the target is segmented or anatomically composite, when the acoustic regime favors asymptotic rather than modal physics, or when a faster screening model is more useful than a full boundary-value solution.
This principle can be restated more concretely. Model choice usually benefits from asking four questions in order:
- What geometry is actually defensible?
- What boundary or material interpretation is physically important?
- Is there a geometry-matched model that represents that boundary physics directly?
- If not, which approximation family best captures the dominant scattering mechanism?
That sequence helps prevent a common mistake, namely choosing a model because its name sounds close to the target rather than because its physical assumptions match the problem.
Geometry-first screening
Sphere family
If the target is well represented as a sphere, the sphere-family
models are the natural starting point. SPHMS is the appropriate first
choice when the object is spherical and the relevant boundary condition
is fluid-filled, rigid, or pressure-release. ESSMS becomes appropriate when the
object is a fluid-filled elastic shell and shell elasticity is
physically important. calibration/SOEMS is
the natural choice for a solid calibration sphere rather than a
biological or fluid sphere. TMM is
relevant when the user wants to stay inside a transition-matrix workflow
for later angular or orientation-based post-processing, even though
SPHMS remains the more direct exact spherical model. HPA belongs to this family only as a
compact asymptotic alternative when a full modal solution is not
needed.
The main point in the spherical branch is that “sphere” alone is not enough to choose a model. A gas-like or fluid-like spherical target, an elastic shell, and a solid calibration sphere may all share a gross geometry while requiring very different physics. Readers should therefore treat geometry as the first screen, not as the full answer.
Prolate spheroid
If the target is elongated but still smooth and well approximated by a prolate spheroid, PSMS is usually the most geometry-matched exact choice. It should be preferred when the prolate spheroidal geometry is a meaningful physical approximation and the boundary condition lies within the model’s scope. TMM is the relevant alternative when a retained transition-matrix representation is the point of the calculation rather than only a monostatic spectrum. HPA can be useful for faster trend-level approximation when a full spheroidal modal calculation is not required.
This branch is most useful when the reader is confident that the target is smoothly elongated and that a spheroidal description is more faithful than a cylindrical or arbitrary segmented one. If the gross elongation is right but the ends, curvature, or internal organization matter strongly, then a more approximate but more physically relevant model family may be preferable to a mathematically elegant but poorly matched canonical geometry.
Oblate spheroid
If the target is flattened rather than elongated and is better
represented as an oblate spheroid, the package path is TMM. That branch is still
experimental, but it is the active shape-matched route for single-target
oblate scattering in the package. The chart also shows OSMS
in gray because a true oblate modal-series companion model remains a
future-development target rather than a public package model.
This oblate branch matters because it separates two different ideas
that are easy to conflate. The first is “can the target be represented
as an oblate spheroid?” The second is “does the package already have a
dedicated oblate modal-series family?” The answer is yes to the first
question and no to the second, which is why the flowchart routes the
public choice through TMM and reserves OSMS
for future development.
Finite cylinder
If the target is better approximated by a straight finite cylinder
than by a sphere or spheroid, FCMS is the natural modal-series
choice. It is most appropriate when the cross-section is circular, the
cylinder is reasonably straight, and the separated finite-cylinder
reduction is defensible. TMM is
shown for cylinders as a guarded experimental branch rather than as a
co-equal default, because its documented supported scope is narrower
than the sphere, oblate, and prolate TMM branches. HPA is useful when only a compact
approximate response is needed, while TRCM is more appropriate when the
dominant physics is high-frequency specular and through-body ray
interference rather than modal structure.
The cylinder branch often involves an especially important judgment call. A reader has to decide whether they care most about modal boundary-condition physics, broad asymptotic trends, or a high-frequency ray picture. Those are not minor stylistic differences. They correspond to different dominant scattering mechanisms.
Approximation-family screening
Weakly scattering elongated fluid-like bodies
If the target is elongated, fluid-like, and weakly contrasting relative to the surrounding water, the DWBA family is usually the general-purpose starting point. DWBA is appropriate when the body can be represented as a weakly scattering centerline plus local cross-sections and deterministic coherence is acceptable. SDWBA should be preferred when the same weak-scattering geometry is appropriate but unresolved posture, roughness, or internal variability is expected to smear the interference pattern.
This is one of the most important non-unique branches in the package.
For many zooplankton-like or krill-like bodies, DWBA and
SDWBA are both defensible. The difference is not geometry
alone. It is whether phase variability is a real part of the scientific
question. If the reader wants the deterministic response of a specified
body posture, DWBA is often the more direct choice. If the
reader wants the response expected after unresolved variability has
already blurred the fine interference pattern, SDWBA is
often closer to the quantity of interest.
High-frequency locally cylindrical targets
If the target is acoustically large enough that specular reflection dominates and a locally cylindrical high-frequency description is reasonable, TRCM becomes relevant. It is appropriate when the dominant physics is well described by two coherent paths, a near-interface reflection and a through-body return. DWBA should be preferred when weak-scattering volume integration is more physically appropriate than a two-ray asymptotic picture, while FCMS should be preferred when a geometry-matched cylindrical modal solution is both available and desirable.
This branch is often where acoustic size matters most. A target may have cylindrical geometry at all frequencies, but the most useful model still changes depending on whether the reader wants weak-scattering behavior, modal behavior, or a high-frequency specular description.
Fish-like bodies with a swimbladder
If the object is a segmented fish body with a gas-filled swimbladder, KRM is usually the most natural model family in the current library. It should be used when the target has a fish-like body-plus-bladder structure and a hybrid Kirchhoff-plus-modal treatment is physically sensible. DWBA or SDWBA may be more appropriate when the body is weakly scattering and the bladder is not the dominant feature. TRCM or HPA are better treated as simplified trend-level or high-frequency approximations, not as replacements when swimbladder physics is central.
This is another case where internal structure matters as much as outer shape. A fish body may be elongated enough to invite comparison with other elongated-body models, but if the scientific question is driven primarily by the interaction between weakly scattering tissue and a strong internal inclusion, KRM is often the more physically transparent first choice.
When several models are reasonable
Sphere or near-sphere
For a sphere or near-sphere, the most common overlap is between
SPHMS and HPA, where SPHMS should
be preferred for mechanistic boundary-condition fidelity and
HPA for a faster asymptotic approximation. Another overlap
occurs between SPHMS and ESSMS, but
ESSMS is only appropriate when shell elasticity genuinely
matters.
Elongated fluid-like bodies
For elongated fluid-like bodies, the most common comparison is
DWBA versus SDWBA, where SDWBA
should be preferred when unresolved phase variability is part of the
expected physics. DWBA versus TRCM is a choice
between weak-scattering volume physics and high-frequency two-ray
specular physics. DWBA versus HPA is a choice
between geometry-specific body structure and a compact trend-level
approximation.
Canonical elongated shapes
For canonical elongated shapes, PSMS versus
HPA is a choice between a true prolate spheroidal model and
a rougher asymptotic descriptor. FCMS versus
TRCM is a choice between modal boundary-condition physics
and high-frequency ray-interference behavior. FCMS versus
HPA is a choice between resolving modal structure and
retaining only the broad scaling and orientation trend.
Whenever several models are reasonable, the most informative approach is often comparison rather than forced selection. Running two defensible models on the same geometry, material properties, and frequency grid can reveal whether the scientific conclusion is robust to model structure or whether it depends strongly on the assumed scattering mechanism. That is often more valuable than trying to declare a winner before the comparison is made.
Practical rule set
If a user wants a quick screening workflow, a simple rule set is
usually enough. Start with the closest canonical geometry you can defend
physically. If an exact or modal-series model exists for that geometry,
use it first unless speed or simplification is the main goal. If the
target is elongated and weakly scattering, start with DWBA.
If the same target also shows unresolved phase variability, compare
against SDWBA. If the target is high-frequency and specular
with locally cylindrical physics, test TRCM. If the target
is fish-like and swimbladder-dominated, test KRM. Use
HPA when a broad asymptotic approximation is more useful
than a geometry-matched exact model.
That rule set is intentionally conservative. It aims to get the reader to a defensible first model, not to guarantee that only one model should ever be run. In many cases, the better habit is to begin with the best-matched first model and then run one neighboring alternative to see how sensitive the interpretation is to the choice of model family.
What this flowchart does not decide
The flowchart does not resolve every scientific choice. It does not decide whether the available morphology is good enough for a given geometry simplification, whether a weak-scattering assumption is quantitatively justified, whether a shell should be treated as rigid, fluid, or elastic, or whether the question is about absolute prediction, comparative trend, or sensitivity analysis.
It also does not decide what level of agreement is good enough once
multiple models have been run. That part of the workflow still requires
judgment about whether the comparison should be made in TS,
in sigma_bs, over a narrow band, over a broad band, or
against particular features such as peaks, nulls, or orientation
trends.
Those are still modeling judgments. The purpose of the decision tree is to narrow the candidate set to the models whose assumptions are closest to the target and to make clear where a user should compare more than one model rather than commit to only one.